
- SĐT liên hệ: (+84) 926 397 972 | (+84) 333 371 116
[PE2024194] PHÁT TRIỂN MỘT SỐ KỸ THUẬT PHÁT HIỆN DỊ THƯỜNG TRÊN ẢNH VIỄN THÁM QUANG HỌC PHỤC VỤ CÔNG TÁC TÌM KIẾM CỨU NẠN
Upload bởi: DevNet27
DevNet27
30,000đ
30,000đ
Nội dung nghiên cứu - Đề xuất thuật toán tăng độ chính xác phát hiện các điểm ảnh dị thường của thuật toán KDE bằng cách giảm tỷ lệ dương tính giả (gọi tắt là thuật toán IKDE). - Đề xuất thuật toán tăng tốc độ tính toán của thuật toán IKDE bằng cách sử dụng kỹ thuật nhóm điểm ảnh, sắp xếp điểm ảnh, áp dụng cây kd-tree và tính toán hàm mật độ xác suất đa luồng trên CPU hoặc song song trên GPU. ˆ Cài đặt, thực nghiệm nhằm kiểm chứng tính đúng đắn của các thuật toán đã đề xuất.
Đồ Án - Luận Văn
Tài liệu
20/06/2024
[hotrodoan.vn]_luan_an_phat_trien_mot_so_ky_thuat_phat_hien_di_thuong_tren_.pdf
-
Chức năng đầy đủ và giống demo 100%
-
Hỗ trợ lắp đặt nếu cần
-
Hỗ trợ trả lời người mua sau khi tải
Bài đăng
151

Đánh giá (4)
5/5

Ngày tham gia
19/06/2024
Kết quả :
Những đóng góp mới của đề tài luận án:
(1) Đề xuất kỹ thuật giảm tỷ lệ dương tính giả (làm tăng độ chính xác phát
hiện) của thuật toán phát hiện dị thường dựa trên ước lượng mật độ nhân
[120, 121] bằng cách khử bớt nhiễu trên ảnh gốc và xác định các khu vực
giới hạn tính toán của Thuật toán KDE. Kết quả thử nghiệm cho thấy:
Thuật toán IKDE tăng 0,58% về độ chính xác phát hiện dị thường so
với Thuật toán KDE. Ngoài tăng về độ chính xác phát hiện dị thường,
Thuật toán IKDE đã giảm được 29,15% tổng thời gian tính toán so với Thuật toán KDE. Giải pháp đề xuất cho thấy hiệu quả trong trường hợp
ảnh đầu vào có nhiễu tăng cao, thuật toán đề xuất chỉ giảm 0,71% so
với ảnh gốc, ngược lại, Thuật toán KDE bị giảm tới 4,17% độ chính xác
phát hiện dị thường so với khi thực thi trên ảnh gốc. Như vậy, khả năng
kháng nhiễu của kỹ thuật đề xuất tốt hơn so với thuật toán gốc.
(2) Đề xuất kỹ thuật tăng tốc độ tính toán của Thuật toán IKDE bằng cách
nhóm các điểm ảnh có giá trị giống nhau làm giảm kích thước dữ liệu
cần tính toán, sắp xếp nhóm các điểm ảnh để tiện lợi cho quá trình tìm
kiếm, áp dụng cây kd-tree để tìm kiếm nhanh các điểm ảnh, nhóm điểm
133
ảnh thỏa mãn hàm nhân; tính toán PDF đa luồng hoặc song song trên
GPU. Từ kết quả thử nghiệm cho thấy kỹ thuật đề xuất mang lại hiệu
quả cao về thời gian tính toán, đặc biệt trên ảnh màu RGB, thời gian
tính toán đã giảm tới hơn 99% so với các thuật toán như Thuật toán
KDE, thuật toán Intel TBB, GPU CUDA. Trên ảnh đa phổ 8 kênh phổ
và ảnh siêu phổ 224 kênh phổ, thuật toán GP-PC2 đã giảm được ít nhất
82,21% so với thuật toán GPU CUDA do Michailidis và các cộng sự đề
xuất năm 2013 [87]. Độ chính xác phát hiện các điểm ảnh dị thường vẫn
được giữ nguyên so với Thuật toán KDE.
Kiến nghị về hướng nghiên cứu tiếp theo:
Trong tương lai, xử lý ảnh đa phổ, siêu phổ để phát hiện dị thường trong
các ứng dụng viễn thám vẫn là một lĩnh vực nghiên cứu đặc biệt, xứng đáng
được đông đảo cộng đồng các nhà khoa học trên thế giới quan tâm. Bởi vì
dữ liệu ảnh viễn thám quang học, đặc biệt là ảnh siêu phổ mang nhiều thông
tin có giá trị có thể hữu ích trong nhiều ứng dụng khác nhau.
Hướng nghiên cứu
Mặc dù luận án đã tập trung nghiên cứu lý thuyết cũng như đề xuất các
kỹ thuật tăng độ chính xác phát hiện dị thường và tăng tốc độ tính toán
nhằm giải quyết các thách thức. Tuy nhiên, còn một số vấn đề cần tiếp tục
được nghiên cứu:
(1) Do tính chất của các điểm ảnh "dị thường" là thưa thớt và hiếm khi
đại diện cho ảnh, dẫn đến tình trạng mất cân bằng nghiêm trọng về số
lượng giữa lớp "dị thường" và lớp "bình thường" trên ảnh. Sử dụng độ
đo phù hợp để đánh giá độ chính xác phát hiện các điểm ảnh dị thường
của các thuật toán như luận án đã sử dụng là một hướng tiếp cận [53],
tuy nhiên, hướng tiếp cận này không giải quyết được gốc của vấn đề là
dữ liệu bị mất cân bằng thực sự. Giải quyết được vấn đề mất cân bằng
dữ liệu có thể làm tăng độ chính xác phát hiện các điểm ảnh dị thường
của các thuật toán, bằng cách: thu thập thêm dữ liệu (Collect More
Data); lấy lại mẫu trong tập dữ liệu (Resampling), gồm Over sampling
(làm gia tăng mẫu của lớp "dị thường") và Under sampling (làm giảm
số lượng quan sát của lớp "bình thường"); tạo mẫu tổng hợp (Generate
Synthetic Samples); ... Ngoài ra, có thể sử dụng phương pháp phạt mô
hình (Penalized Models), có nghĩa rằng: việc dự báo sai một quan sát
134
thuộc mẫu "bình thường" sẽ ít nghiêm trọng hơn so với dự báo sai một
quan sát thuộc mẫu "dị thường", do đó, sẽ phạt nặng hơn đối với sai số
dự báo thuộc nhóm "dị thường" bằng cách gán cho nó một trọng số lớn
hơn trong công thức của hàm loss function.
(2) Xem xét một điểm ảnh bất kỳ trong ảnh cho thấy: điểm ảnh này ít nhiều
đều có mối quan hệ với những điểm ảnh xung quanh nó. Do đó, nghiên
cứu, phân tích mối quan hệ ràng buộc dữ liệu, mối tương quan về mặt
không gian của các điểm ảnh có thể làm tăng độ chính xác phát hiện dị
thường của các thuật toán.
(3) Trong thuật toán IKDE, việc lựa chọn một vùng cửa sổ cố định W có
thể lãng phí thời gian tính toán (nếu dị thường có kích thước nhỏ) hoặc
không phát hiện hết điểm dị thường (nếu dị thường có kích thước lớn).
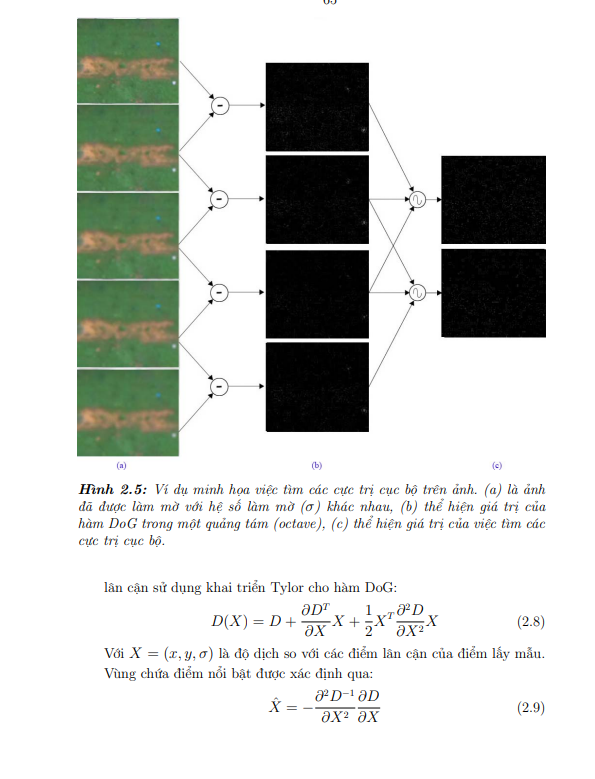
Quan sát Hình 2.6 có thể thấy: giá trị DoG của các điểm ảnh dị thường
cao hơn (hoặc thấp hơn) những điểm ảnh xung quanh không phải là dị
thường. Do đó, có thể sử dụng giá trị này để tìm kích thước cửa sổ W
thích nghi cho PUT, tránh lãng phí thời gian tính toán.
(4) Phát hiện cụm điểm ảnh dị thường cần kết hợp các đặc trưng hình dạng,
kích thước trên cùng một kỹ thuật phát hiện các điểm ảnh dị thường.
(5) Xây dựng bộ dữ liệu đặc trưng đầy đủ, phong phú sẽ cải thiện đáng kể
việc nghiên cứu trong lĩnh vực này, cho phép so sánh tốt hơn giữa các
phương pháp theo các kịch bản khác nhau.
(6) Phát hiện các điểm ảnh dị thường theo thời gian thực có thể được thực
hiện bằng cách xử lý dữ liệu trực tuyến hoặc cung cấp kết quả phát hiện
trong thời gian thực. Những vấn đề này vẫn còn bỏ ngỏ và đã thu hút
sự chú ý của cộng đồng khoa học, thể hiện trong các công trình nghiên
cứu gần đây đã tập trung vào các kỹ thuật dựa trên biểu diễn và triển
khai các phương pháp tiếp cận dựa trên mạng nơ-ron [54, 124].
Xuất sắc
Rất tốt
Tốt
Trung Bình
Cần cải thiện
Bài đăng cùng danh mục:
 PE1
PE1
 admindev
admindev PE13
PE13
 PE24
PE24
Website bán quần áo tích hợp chatbot AI và cổng thanh toán VNPay
80,000đ
160,000đ
-50%
 PE19
PE19
 PE11
PE11
NGHIÊN CỨU, XÂY DỰNG CHATBOT HỎI ĐÁP THÔNG TIN KHÁCH SẠN SỬ DỤNG RASA FRAMEWORK
50,000đ
100,000đ
-50%
 Linhketoan
Linhketoan PE26
PE26
 PE202474
PE202474
Bài đăng mới nhất:
 PE2025206
PE2025206
 giaodichcode.contact
giaodichcode.contact PE2025205
PE2025205
 PE2025204
PE2025204
Full Code Nền tảng học trực tuyến LMS (NextJS + NodeJS + MongoDB + Chatbot AI)
499,999đ
999,999đ
-50%
 PE2025203
PE2025203
 votruong
votruong PE2025202
PE2025202
 thong.phan109
thong.phan109 PE2025201
PE2025201
 PE2025200
PE2025200
5,123
+
THÀNH VIÊN
40,587
+
LƯỢT TẢI
9,421
+
LƯỢT ĐĂNG
92,346
+
KHÁCH HÀNG TƯƠNG TÁC
- Đơn vị kinh doanh: Công ty TNHH Đầu Tư Công Nghệ TechByte
- Địa chỉ: Số nhà 10, dãy H, Khu tập thể Công an Đa Sỹ, Phường Kiến Hưng, Quận Hà Đông, Thành phố Hà Nội, Việt Nam
- Phone: (+84) 926 397 972
- Phone: (+84) 333 371 116
- Email: [email protected]
- Website: https://hotrodoan.vn/
- Giấy phép kinh doanh: Số 0110801570 bởi Sở Kế hoạch và Đầu tư Hà Nội.

Copyrights © 2023
Nội dung đã được bảo vệ bản quyền
