
- SĐT liên hệ: (+84) 926 397 972 | (+84) 333 371 116
[PE2025134] NGHIÊN CỨU NÂNG CAO CHẤT LƯỢNG ĐIỀU KHIỂN BÁM QUỸ ĐẠO CỦA PHƯƠNG TIỆN CHUYỂN ĐỘNG NGẦM -28%
Upload bởi: kimcuongt3
kimcuongt3
250,000đ
180,000đ
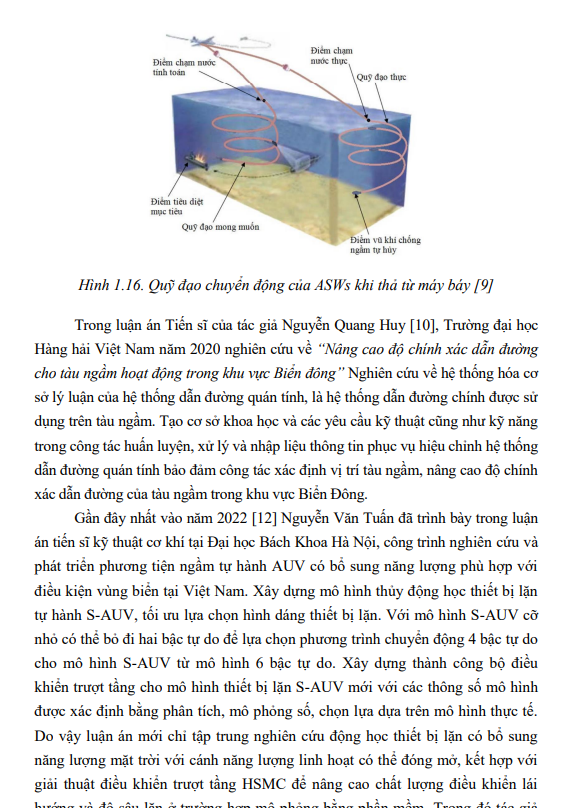
Phương tiện chuyển động ngầm nói chung và AUV nói riêng rất cần thiết, hữu hiệu trong việc phục vụ các ngành công nghiệp như: Xây dựng công trình biển, khảo sát nghiên cứu biển, hải dương học, tìm kiếm cứu hộ, kinh tế biển và quốc phòng. Đặc biệt trong quân sự hiện nay AUV có thể được ví như UAV (thiết bị bay không người lái) trên mặt đất với tầm quan trọng được được khẳng định trong rất nhiều công trình ứng dụng gần đây
Điện Tử Viễn Thông
Tài liệu
26/03/2025
hotrodoan.vn_Nghiên cứu nâng cao chất lượng điều khiển bám quỹ đạo của phương tiện chuyển động ngầm.pdf
-
Chức năng đầy đủ và giống demo 100%
-
Hỗ trợ lắp đặt nếu cần
-
Hỗ trợ trả lời người mua sau khi tải
Bài đăng
143

Đánh giá (0)
0/5

Ngày tham gia
11/03/2025
Luận án đã lựa chọn mô hình phương tiện chuyển động ngầm AUV 4 bậc
tự do hệ thiếu cơ cấu chấp hành là đối tượng ứng dụng để mở ra hướng nghiên
cứu mới cho kỹ thuật điều khiển hiện đại. Với nhiệm vụ đặt ra là nâng cao chất
lượng điều khiển bám quỹ đạo của phương tiện chuyển động ngầm AUV 4
DOF, luận án đã đạt được một số kết quả như sau:
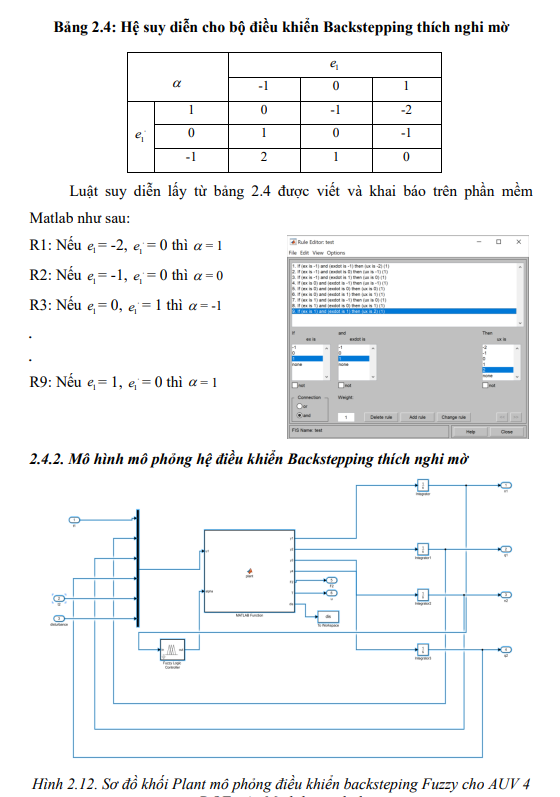
- Xây dựng thành công bộ điều khiển Backstepping kiểm chứng mô hình
và đảm bảo quỹ đạo cho AUV 4 DOF hệ thiếu cơ cấu chấp hành.
- Ứng dụng bộ điều khiển backtepping thích nghi sử dụng hệ logic mờ để
chỉnh định tham số của bộ điều khiển.
- Khẳng định ưu điểm của bộ điều khiển kép Adaptive Fuzzy
Backstepping (AFB) về độ bền vững với nhiễu và thời gian quá độ giảm.
- Luận án nghiên cứu thành công phương pháp điều khiển trượt tầng
Hierarchical Sliding Mode Controller (HSMC) thích nghi nơ-ron cho mô hình
AUV 4DOF thiếu cơ cấu chấp hành. Thông qua định lý Lyapunov chứng minh
được tính ổn định của hệ thống.
Xuất sắc
Rất tốt
Tốt
Trung Bình
Cần cải thiện
Bài đăng cùng danh mục:
 PE2024303
PE2024303
 Sec06
Sec06 PE2024304
PE2024304
 PE2024305
PE2024305
 PE2024307
PE2024307
 PE2024308
PE2024308
 PE2024309
PE2024309
Bài đăng mới nhất:
 PE2025205
PE2025205
 PE2025204
PE2025204
Full Code Nền tảng học trực tuyến LMS (NextJS + NodeJS + MongoDB + Chatbot AI)
499,999đ
999,999đ
-50%
 PE2025203
PE2025203
 votruong
votruong PE2025202
PE2025202
 thong.phan109
thong.phan109 PE2025201
PE2025201
 PE2025200
PE2025200
 PE2025199
PE2025199
 khangvo601
khangvo6015,123
+
THÀNH VIÊN
40,587
+
LƯỢT TẢI
9,421
+
LƯỢT ĐĂNG
92,346
+
KHÁCH HÀNG TƯƠNG TÁC
- Đơn vị kinh doanh: Công ty TNHH Đầu Tư Công Nghệ TechByte
- Địa chỉ: Số nhà 10, dãy H, Khu tập thể Công an Đa Sỹ, Phường Kiến Hưng, Quận Hà Đông, Thành phố Hà Nội, Việt Nam
- Phone: (+84) 926 397 972
- Phone: (+84) 333 371 116
- Email: [email protected]
- Website: https://hotrodoan.vn/
- Giấy phép kinh doanh: Số 0110801570 bởi Sở Kế hoạch và Đầu tư Hà Nội.

Copyrights © 2023
Nội dung đã được bảo vệ bản quyền
